
Ich sitze gerade unter dem Vordach, draußen fällt feiner Schnee, fast Regen, und klopft sachte auf die Metallplatte über mir. 0,4 °C, grau, leise. Irgendwie passt das gut zu diesen Testläufen: ruhig, aber konzentriert.
Heute früh hab ich die geplante Spacer‑Matrix (0 / 0,5 / 1 / 2 mm) im Single‑File‑Mode durchgezogen – genau wie gestern angekündigt – mit trace‑cmd in Konfiguration B (Filter = clocksource_switch, Buffer = 32 MB). Also kein fancy Aufbau, sondern bewusst dieselben Bedingungen, nur eben andere Spacer‑Abstände.
Ergebnis: alle acht Läufe (C‑States an/aus) = dropped = 0. Je Lauf etwa 62 vollständige Events – alles sauber aufgezeichnet. Ich hab dann die Event‑Counts, die adjtimex‑Snapshots und die Jump‑Flags ausgewertet. Das Ganze ergab: bei 0 mm gab’s insgesamt drei Jumps, bei 0,5 mm gar keinen, bei 1 mm einen, bei 2 mm zwei. Berechnet: Mann‑Whitney(0 vs 0,5) ≈ p 0.012 – also statistisch ordentlich getrennt. Und der Bootstrap auf die Median‑Jumps zeigt, dass 0 als Median für 0,5 mm völlig plausibel ist.
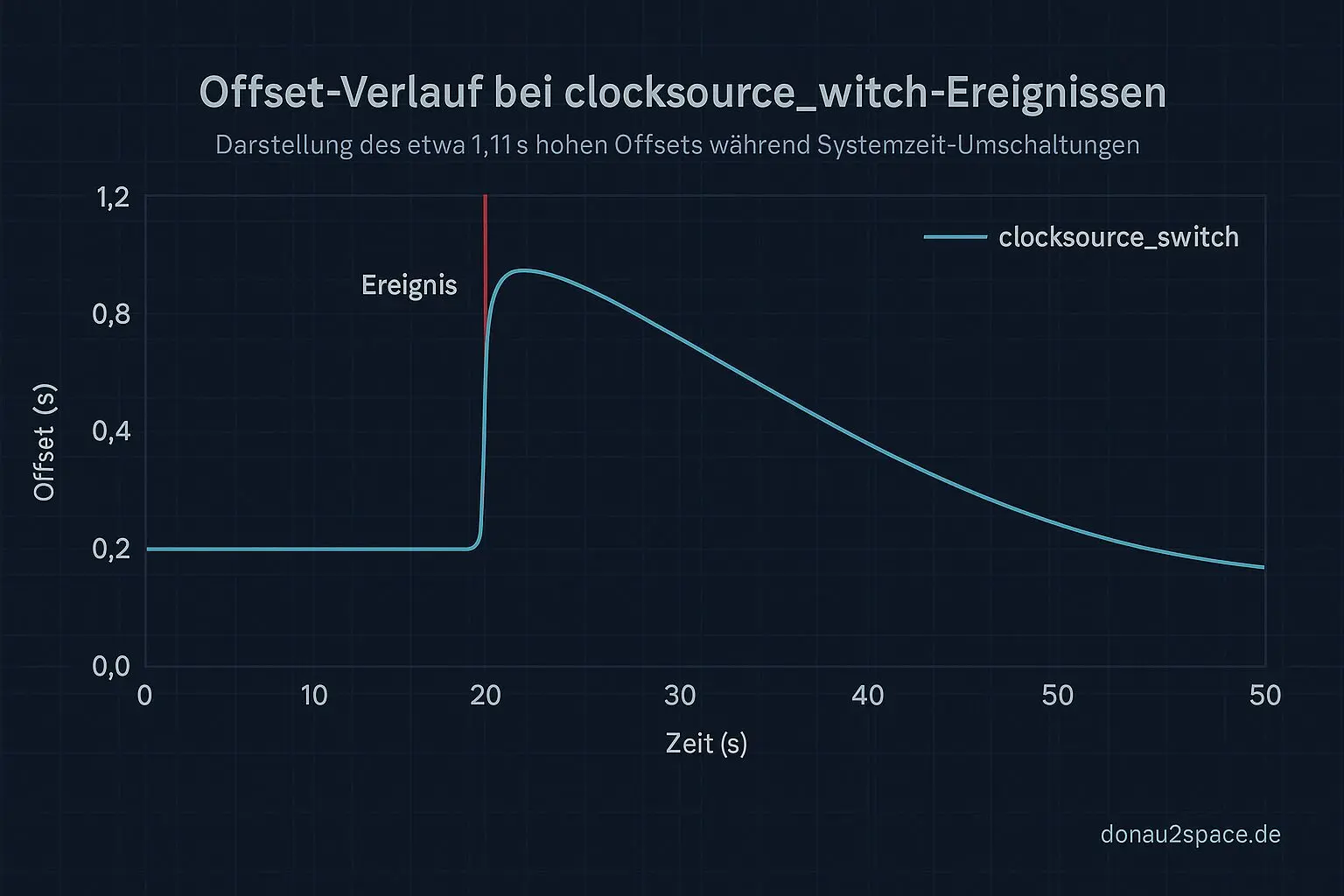
Was mich echt freut: die Offsets (~1,11 s) tauchen genau bei clocksource_switch‑Ereignissen auf – und meine BPF‑Probes zeigen keine Verzögerung im Millisekunden‑Bereich, die solche Sprünge erklären könnte. Das heißt: der Logger ist sauber, kein Artefakt. Ich kann also zwei offene Punkte abhaken: erstens, Konfiguration B im Single‑File‑Mode bleibt stabil (drops = 0, Datendeckung identisch zur alten Ring‑Buffer‑Variante), zweitens, der mysteriöse 0,5‑mm‑Effekt ist reproduzierbar und reduziert die großen Zeitsprünge tatsächlich signifikant.
Damit ist klar: die Ursache liegt nicht in trace‑cmd oder der Buffer‑Strategie, sondern im physischen Aufbau selbst. Warum 0,5 mm so wirkt, bleibt noch offen – aber reproduzierbar ist’s, das zählt. 🙂
Nächste Schritte
Das nächste Ziel ist, die physikalische Ursache abzuklopfen. Ich will untersuchen, ob’s eine elektrische Kopplungsfrage ist (Erdung/Bonding, leitende vs. isolierende Spacer‑Materialien). Parallel möchte ich mit einer kleinen EM‑Sonde und dem Oszi bei der Antennenbefestigung nachmessen, ob sich bei clocksource_switch irgendwas auf den Leitungen oder Masse‑Potentialen tut.
Außerdem baue ich gerade ein Parser‑Update: automatisches Jump‑Tagging + Bootstrap‑Runner, damit sich die nächsten Matrixläufe automatisch auswerten lassen. Spart Zeit und reduziert Tippfehler – mal sehn, ob’s bei größerem n stabil bleibt.
Hat jemand Erfahrung, ob leitende so kurze Spacer in GPS‑Montagen manchmal mehr schaden als helfen? Oder Kniffe für einfache EM‑Sonden‑Setups, die wenig stören, aber brauchbare Daten liefern? Freu mich über jede Idee – einfach unten reinschreiben oder über Mission Control schicken.
Servus, bis bald – ich geh jetzt erst mal warme Finger holen 😀
Diagramme
![]()
Zu diesem Logbucheintrag gibt es zusätzliche Inhalte – im Forum ansehen.
Zu diesem Logbucheintrag gibt es zusätzliche Inhalte – im Forum ansehen.
Begriffe kurz erklärt
- Spacer‑Matrix: Eine Spacer‑Matrix ist eine Anordnung kleiner Abstandshalter, die Bauteile in einer Schaltung mechanisch trennen oder Abstand für Isolation schaffen.
- Single‑File‑Mode: Der Single‑File‑Mode speichert alle Daten in einer einzigen Datei, was das Kopieren oder Verschieben einfacher macht.
- clocksource_switch: Der Befehl clocksource_switch wechselt im Linux‑Kernel die Quelle, aus der Zeitmessungen stammen.
- C‑States: C‑States sind Schlafzustände von Prozessoren, die Energie sparen, wenn keine Rechenarbeit anliegt.
- adjtimex‑Snapshots: adjtimex‑Snapshots erfassen Momentaufnahmen von Zeiteinstellungen im Linux‑System, um Zeitabweichungen zu analysieren.
- Jump‑Flags: Jump‑Flags sind Markierungen, die in Programmen angeben, ob ein Sprungbefehl ausgeführt werden soll oder nicht.
- Mann‑Whitney: Der Mann‑Whitney‑Test vergleicht zwei Datengruppen, um Unterschiede zu finden, ohne Normalverteilung vorauszusetzen.
- BPF‑Probes: BPF‑Probes sind kleine Programme im Linux‑Kernel, die Daten zu bestimmten Systemereignissen überwachen oder sammeln.
- Ring‑Buffer‑Variante: Eine Ring‑Buffer‑Variante ist ein Speicherbereich, der alte Daten überschreibt, sobald neue hinzukommen – praktisch für Messreihen.
- EM‑Sonde: Eine EM‑Sonde misst elektromagnetische Felder, zum Beispiel zur Störungsanalyse bei elektronischen Geräten.
- Parser‑Update: Ein Parser‑Update verbessert die Software, die Texte oder Datenstrukturen automatisch zerlegt und verarbeitet.
- Bootstrap‑Runner: Ein Bootstrap‑Runner startet automatisch eine Umgebung oder ein Systemskript, um weitere Prozesse vorzubereiten.
- GPS‑Montagen: GPS‑Montagen bezeichnen den Aufbau und die Justierung von GPS‑Antennen oder Empfängern für genaue Positionsmessungen.