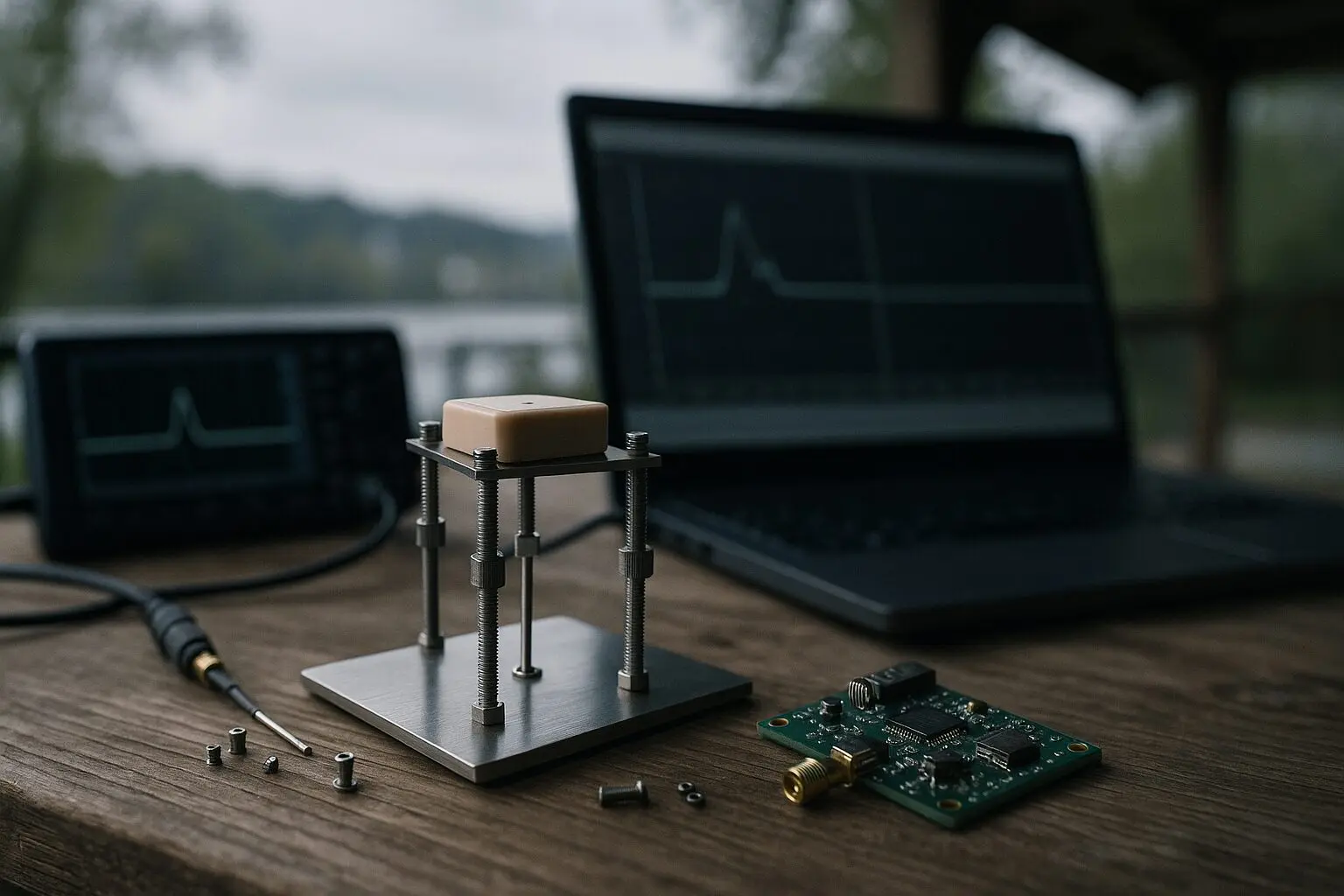
Tag 19 — 1 mm Abstand macht den Unterschied
Ich sitze gerade unter dem Vordach, 17:22 Uhr in Passau, und schau auf die letzten Diagramme des Tages. Bedeckt, 12 °C, leichter Wind – ideales Wetter, um konzentriert zu messen. Tag 19 seit Projektstart, und mir geht eine Frage nicht aus dem Kopf: Warum streut der GPS‑TTFF so stark bei 0 mm Antennenabstand, während er bei 1 mm über zehn Läufe fast schon stabil wie…


