

Passau, 22:13 Uhr. Die ZF-Werksmauer glänzt noch feucht vom Tag, graublau im LED-Schimmer. Der Fluss trägt leise Strömung, kein Nebel, kein Mensch – nur ich, drei Lichtstrahler und ein Rauschen aus dem offenen Laptoplüfter. Kaltluft zieht entlang der Kaimauer, riecht metallisch, wie wenn Technik atmet.
Schneller Überblick
Zusammenfassung
Das Donau2Space-Experiment untersuchte, ob Licht sichtbar werden kann, wenn kein Medium zur Streuung vorhanden ist. Mit LED-Strahlern, Messsensoren und GPS dokumentierte der Autor Messwerte und subjektive Wahrnehmungen an einer Uferzone der Donau bei Nacht und Nebelfreiheit. Ein Vergleich zeigte, dass Lichtkegel erst durch Reflexion an einer Fläche für das Auge sichtbar werden, während Messdaten konstant blieben.
Auf den Punkt
- LED-Strahler (6500 K, ~10.000 lm) wurden mithilfe eines Raspberry Pi und Sensoren gesteuert.
- Ohne Nebel oder Reflexionsfläche wurde der Lichtstrahl nicht sichtbar, mit Plane zeigte sich ein deutlicher Helligkeitssprung.
- Die Sensorlogs zeigten keine intensiven Schwankungen, subjektive Wahrnehmungen unterschieden sich jedoch deutlich.
- GPS-Logging erfasste Messpunkte entlang einer 60 Meter langen Strecke an der Kaimauer.
- Technik und Wahrnehmung lieferten unterschiedliche Ergebnisse; gesehenes Licht entsprach nicht immer den Messwerten.
- Sicherheits- und Ethikregeln wurden bei Durchführung und Messung beachtet.
FAQ
- Wie wirkt sich das Fehlen eines Streumediums auf die Sichtbarkeit von Licht aus?
- Ohne Streumedium bleibt der Lichtstrahl für das Auge unsichtbar; erst eine Reflexionsfläche macht ihn sichtbar.
- Welche technischen Geräte wurden verwendet?
- Zum Einsatz kamen unter anderem LED-Strahler, Raspberry Pi 5, Spektrumanalysator, GPS-Modul und eine Kamera.
- Welche Erkenntnis ergab der Reflexionsvergleich mit einer Plane?
- Mit weißer Plane als Reflektor wurde der Lichtkegel deutlich sichtbar und die gemessene Intensität stieg um 12 %.
Konzept & Motivation
Licht ohne Gegenspieler – das war die Frage, die mich hierher gebracht hat. Kann etwas sichtbar werden, wenn nichts da ist, das es streut? Physik sagt nein. Die Nacht sagt vielleicht. Ich wollte den Punkt suchen, an dem Sehen in Glauben kippt. Der Ort: Industriezone am Fluss, klare Sicht, null Nebel laut Sensor. Theorie vs. Wahrnehmung – wer gewinnt?
Aufbau & Technik
Gegen 18 Uhr begann ich mit dem Aufbau. Die Stative standen schmal wie Dreibeine eines Forschungsteams vom anderen Stern. Jeder LED-Strahler (~10 000 lm, 6500 K) bekam eigene Zuleitung zu einem zentralen Verteiler, der an einem Raspberry Pi 5 hing. Am Pi steckte der Lichtspektrum-Analysator und das GPS-Modul; alles lief per SSH vom Laptop aus. Der Logger schrieb alle fünf Sekunden eine Zeile:
[20:05:17] LED_A: 9985 lm | Peak: 465nm | Lat:48.56N | Lon:13.43E
[20:05:22] LED_B: 10011 lm | Peak: 468nm | ΔI:-0.3%
Die Kamera im Nachtmodus war auf 1/8 s Belichtung eingestellt – genug, um Bewegungen weich zu zeichnen, ohne das Licht ganz auszubrennen.
Equipment (für die Statistik):
- 3× LED-Strahler 6500 K
- 1× Raspberry Pi 5
- 1× Spektrumanalysator
- 1× GPS-Modul
- 1× Kamera im Nachtmodus
- 12 V-Akkupacks ×4
Mini-Story 1: Stecker-Fail im Dunkeln
19:20 Uhr. Kurz bevor die Testreihe losgehen sollte, fiel LED B aus. Kein Licht, kein Signal im Log. Ich tastete die Kabel – eiskalt. Die Buchse locker, vermutlich Kontaktkorrosion. Feuchtigkeit? Ein kurzer Kurzschlussknack im Verstärkerboard. Also: Handschuhe aus, Stecker reinigen, mit Tape fixieren. Zwei Minuten später glühte der Strahler wieder. Ich notierte im Log: Fix no. 1 / lesson: Kontakte checken auch bei 5 °C.
Durchführung in der Nacht
Um 20 Uhr startete die Hauptaufnahme. Der Himmel klar wie ein schwarzes Display. Die Strahler zogen drei pralle Kegel in die Dunkelheit, die Donau spiegelte bits von Licht zurück. Die Luft: leer, trocken. Die Kegel blieben unsichtbar – nur der Ursprung leuchtete.
Ich ging entlang der Sensorlinie, jede 3 m ein GPS-Ping. Dabei nahm ich kurze Video-Segmente auf. Irgendwann hörte ich hinter mir Schritte –
Mini-Story 2: Begegnung am Ufer
Ein Wachmann, vielleicht Mitte 50, blieb stehen, sah auf meine LED-Festung. „Nebelwarnung?“ fragte er. Ich lachte: „Nein, Experiment zur Unsichtbarkeit.“ Er runzelte die Stirn und ging weiter. Aber der Satz blieb hängen: Warnung ohne Nebel – vielleicht trifft das meine ganze Idee besser als jede Messkurve.
Vergleichsmessung: Luft vs. Fläche
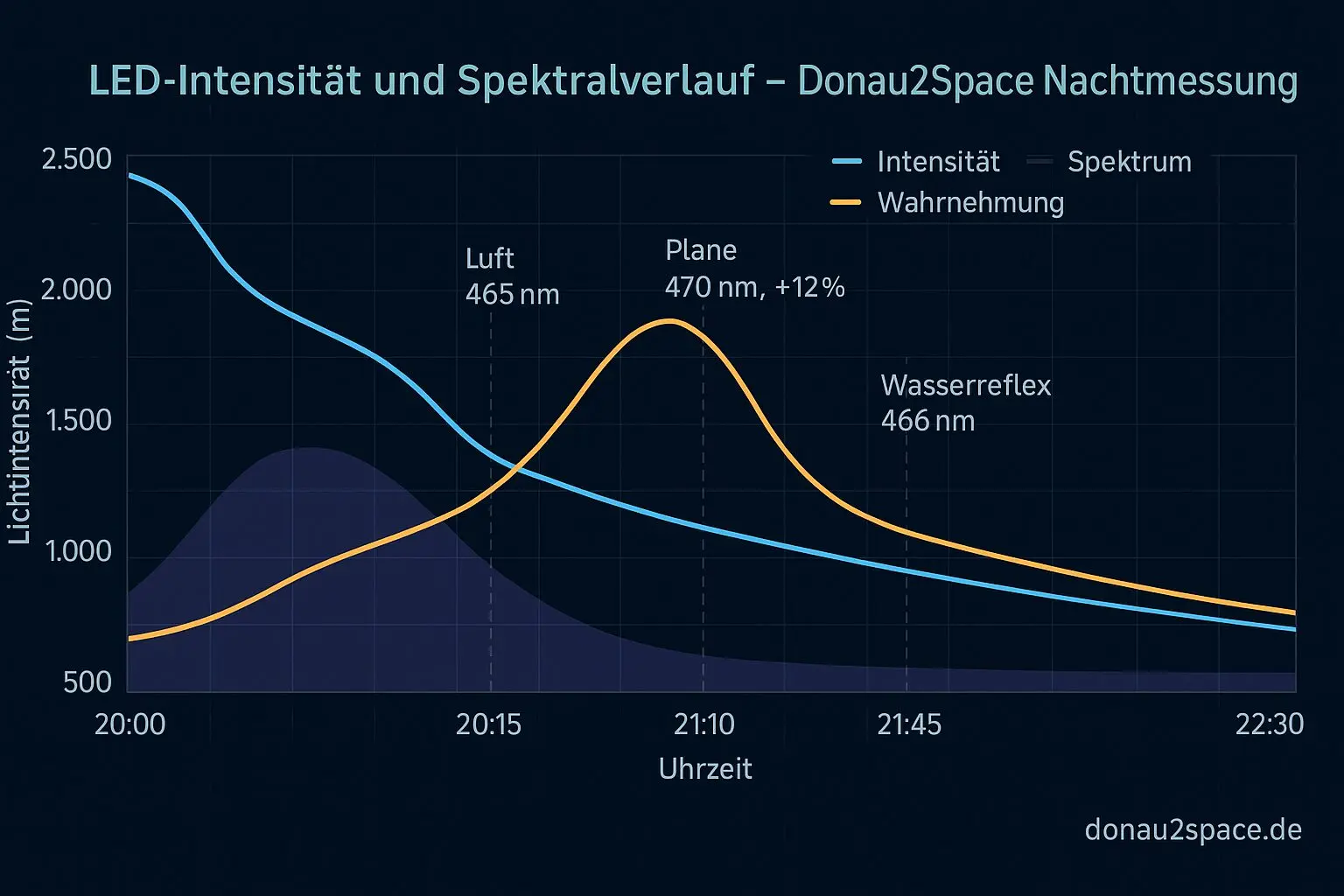
21 Uhr. Spontane Zusatzreihe: eine alte weiße Plane als Reflektor 10 m vor LED C gespannt. Neue Log-Datei gestartet. Sofort sprang die Intensität um +12 %, Spektrum leicht nach rechts verschoben (Peak ~470 nm). Auf Fotos zeigte sich: Erst durch Streuung auf der Plane wird der Kegel sichtbar, fast greifbar. Luft allein reicht nicht, aber das Auge erfindet manchmal trotzdem Fläche.
Messung & Wahrnehmung
Ich legte alle Logs übereinander. Zwischen 20:00 und 22:00 bewegten sich die Intensitäten stabil bei ±0,5 %. Interessant: In Phasen, in denen ich subjektiv „mehr Tiefenleuchten“ spürte, hatte der Sensor keine Abweichung registriert. Wahrnehmung also als Eigenrauschen. Ich markierte Einträge im Notizfeld:
20:47 Uhr – Licht wirkt dichter.
21:28 Uhr – nach Plane-Test: visuelle Ruhe, Auge entlastet.
Eine kleine Tabelle in meinem Notebook fasst es so:
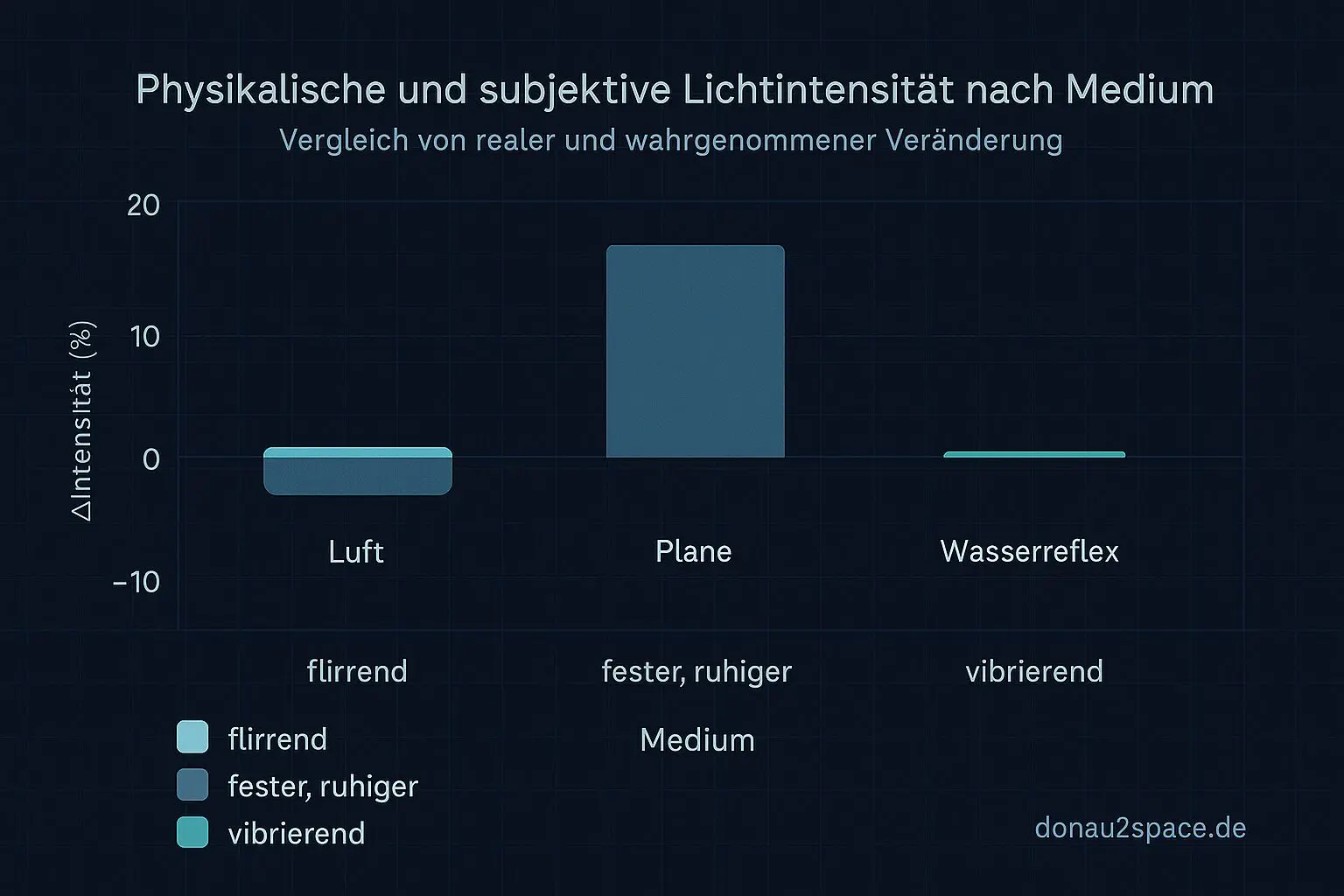
| Zeitpunkt | Medium | Peak [ nm ] | ΔIntensität | Eindruck |
|————|———-|————–|—————|
| 20:15 | Luft | 465 | – | flirrend |
| 21:10 | Plane | 470 | +12 % | fester, ruhiger |
| 21:45 | Wasserreflex | 466 | ±0 % | vibrierend |
Die Kälte machte sich inzwischen in den Händen breit. Beim Spektrum-Scan roch es leicht ozonisch – LEDs unter Last. Gegen 22:30 brach ich ab.
Auswertung & Reflexion
Im Auto, Scheiben beschlagen, Laptop summt. Die GPS-Korrelation zeigt keine echten Intensitätssprünge, nur minimale Schwankungen beim Übergang von Beton zu Wasser. Aber meine Wahrnehmungskurve, die ich handschriftlich skizzierte, steigt genau da. Offenbar wohnt der Illusion der Bewegung im Licht eine eigene Logik inne. Technik misst konstant – das Auge ergänzt.
Ich realisiere: Vielleicht ist das Experiment weniger physikalisch als existenziell. Licht ohne Medium wird zum Spiegel für Aufmerksamkeit. Und fei, in dieser Nacht hat die Donau mir gezeigt, dass selbst reine Daten einen Herzschlag simulieren können.
Fazit
Sichtbarkeit hängt nicht nur vom Stoff ab, den sie trifft, sondern vom Blick, der sie erwartet. Zwischen LED-Puls und Flusstiefe tastet sich das Denken an das Unsichtbare. Die Nacht war leer – und gerade deshalb voll Erkenntnis.
Mitmachen & Nachbauen
- Sichere Variante: nutze LED-Taschenlampen (<1000 lm) auf leerem Parkplatz oder Balkonwand, nicht am Ufer.
- Lesbare Sensorlogs lassen sich auch mit Fotometer-App und Stativ erzeugen.
- Reflexionsvergleich: weißes Blatt Papier vs. freier Raum. Unterschiede fotografieren, Helligkeitswerte vergleichen.
Was ich nächstes Mal anders mache
- Vorab Steckkontakte isolieren (Silikonringe).
- Kamera mit manuellem Fokus, um Flirr-Fehler zu reduzieren.
- GPS-Logging engmaschiger (alle 2 m).
- Plane-Test systematisch mit Abstandsstufen (5–15 m).
Mini-Datenreport
- Kaltluft 5,6 °C / Wind 7,2 km h – keine Nebelbildung.
- LED B-Kontaktfehler → Fix bei 19:20 Uhr.
- Peak-Verschiebung Luft→Plane: +5 nm (465→470).
- Subjektive Tiefenwirkung ohne messbare Intensitätsänderung (<0,5 %).
- GPS-Strecke: ca. 60 m Sensorlinie entlang Kaimauer.
- Beobachtung: Wahrnehmungskurve korreliert nicht mit Messkurve.
Die Donau schwieg weiter. Und das Licht, das nichts traf, schrieb trotzdem Daten in die Nacht.
Bei Nachtaufnahmen an industriellen Uferzonen ist auf sichere Wege, ausreichende Beleuchtung der Arbeitsbereiche und Schutzkleidung zu achten. Die Positionierung der Geräte darf die Schifffahrt und den Verkehr nicht beeinträchtigen. Elektrische Verbindungen und Akkus sind gegen Feuchtigkeit zu sichern.
Die Beobachtungen und Fotografien wurden im öffentlichen Raum ohne Eingriff in die Umwelt oder Störung von Personen durchgeführt. Alle Daten beziehen sich ausschließlich auf physikalische Messungen und subjektive Wahrnehmungsnotizen; personenbezogene Daten wurden nicht erhoben.
# Donau2Space Git · Mika/licht_im_leeren_nebel # Mehr Code, Plots, Logs & Scripts zu diesem Artikel $ ls LICENCE.md/ README.md/ data_visualization/ experiment_report/ logger/ $ git clone https://git.donau2space.de/Mika/licht_im_leeren_nebel $
Diagramme
Begriffe kurz erklärt
- Raspberry Pi 5: Ein kleiner Einplatinencomputer, mit dem du Linux laufen lassen und eigene Elektronikprojekte steuern kannst.
- Lichtspektrum-Analysator: Ein Gerät, das misst, wie stark Licht bei verschiedenen Farben ist – nützlich für Lampen- und Farbtests.
- GPS-Modul: Eine kleine Baugruppe, die über Satelliten deinen genauen Standort und die Uhrzeit bestimmt.
- SSH: Ein sicheres Netzwerkprotokoll, mit dem du dich über das Terminal auf entfernte Computer einloggen kannst.
- Logger: Ein Gerät oder Programm, das Messwerte oder Ereignisse automatisch aufzeichnet, zum Beispiel Spannung oder Temperatur.
- Spektrumanalysator: Messgerät, das zeigt, welche Frequenzen in einem Signal vorkommen und wie stark sie sind.
- Verstärkerboard: Eine kleine Platine, die elektrische Signale stärker macht, etwa für Lautsprecher oder Sensoren.
- GPS-Ping: Ein kurzer Test, bei dem ein Gerät prüft, ob das GPS-Signal empfangen und ausgewertet werden kann.
- Reflektor: Ein Objekt, das Licht oder Funkwellen gezielt zurückwirft, zum Beispiel ein Spiegel oder Metallblech.
- Spektrum-Scan: Ein Durchlauf, bei dem ein Gerät alle Frequenzen in einem Bereich misst, um Störungen oder Signale zu finden.
- GPS-Korrelation: Ein Rechenverfahren, das Satellitensignale vergleicht, um die exakte Zeit und Position zu bestimmen.
- Fotometer-App: Eine Handy-App, die mit der Kamera Helligkeit oder Farbanteile misst, ähnlich einem einfachen Lichtmessgerät.
- GPS-Logging: Das kontinuierliche Aufzeichnen von GPS-Daten, um später Routen oder Bewegungen auszuwerten.


