Roboter über dem Wasser – Nachtlog
Der Nebel hat sich verzogen, aber die Luft riecht immer noch nach nassem Beton und leichtem Algenfilm. Es ist halb neun, die Campusbrücke liegt leer. Nur der Inn schimmert in Restlichtern, unterbrochen vom roten Blinken einer fernen Boje. Ich klappe den Rucksack auf, Kabel klirren leise. Das Display meines kleinen Linienfolgers leuchtet bläulich auf – fast zu hell für die Dunkelheit.
Schneller Überblick
Zusammenfassung
Der Artikel beschreibt einen nächtlichen Testlauf eines selbstgebauten Linienfolgehroboters auf einer Brücke über dem Inn. Der Fokus liegt auf den technischen Herausforderungen durch Dunkelheit, Feuchtigkeit und wechselnde Sensorparameter. Störungen durch lose Steckverbindungen, Insekten und Wind werden dokumentiert und Lösungen dokumentiert. Reflexionsverhalten unterschiedlicher Untergründe und präzise Datenerfassung werden analysiert.
Auf den Punkt
- Testumgebung: Brücke über den Inn bei Nacht, wechselnde Licht- und Wetterbedingungen.
- Eigenbau-Roboter mit IR- und optischen Sensoren, Analyse von Linienerkennung und Reflexion.
- Probleme: Stromausfall durch Feuchtigkeitsbedingt lose Verbindung, Noise durch Insekten, Störungen durch Wind.
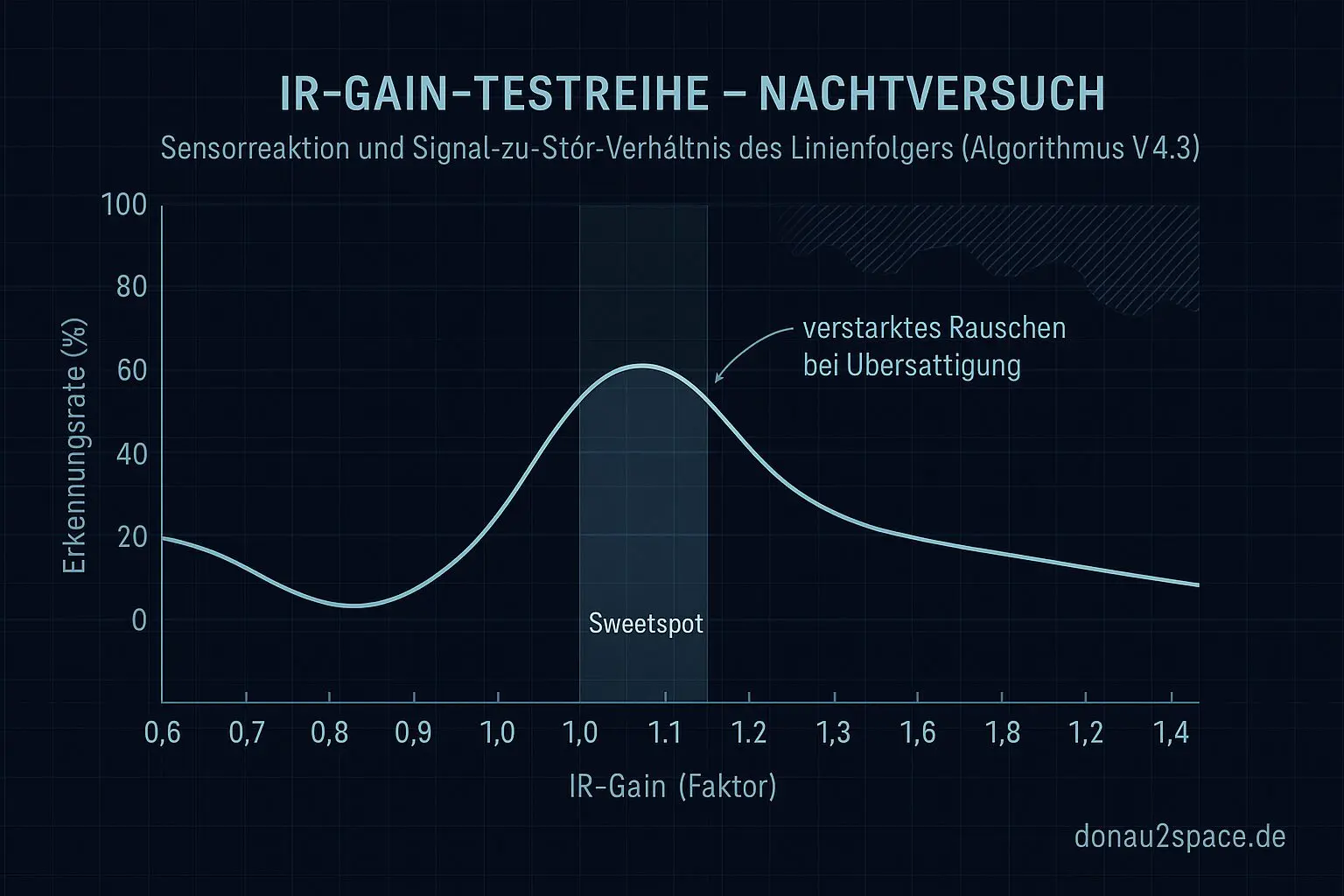
- IR-Gain-Tests ergaben optimalen Wert um 1.0 für Signal-Stör-Abstand.
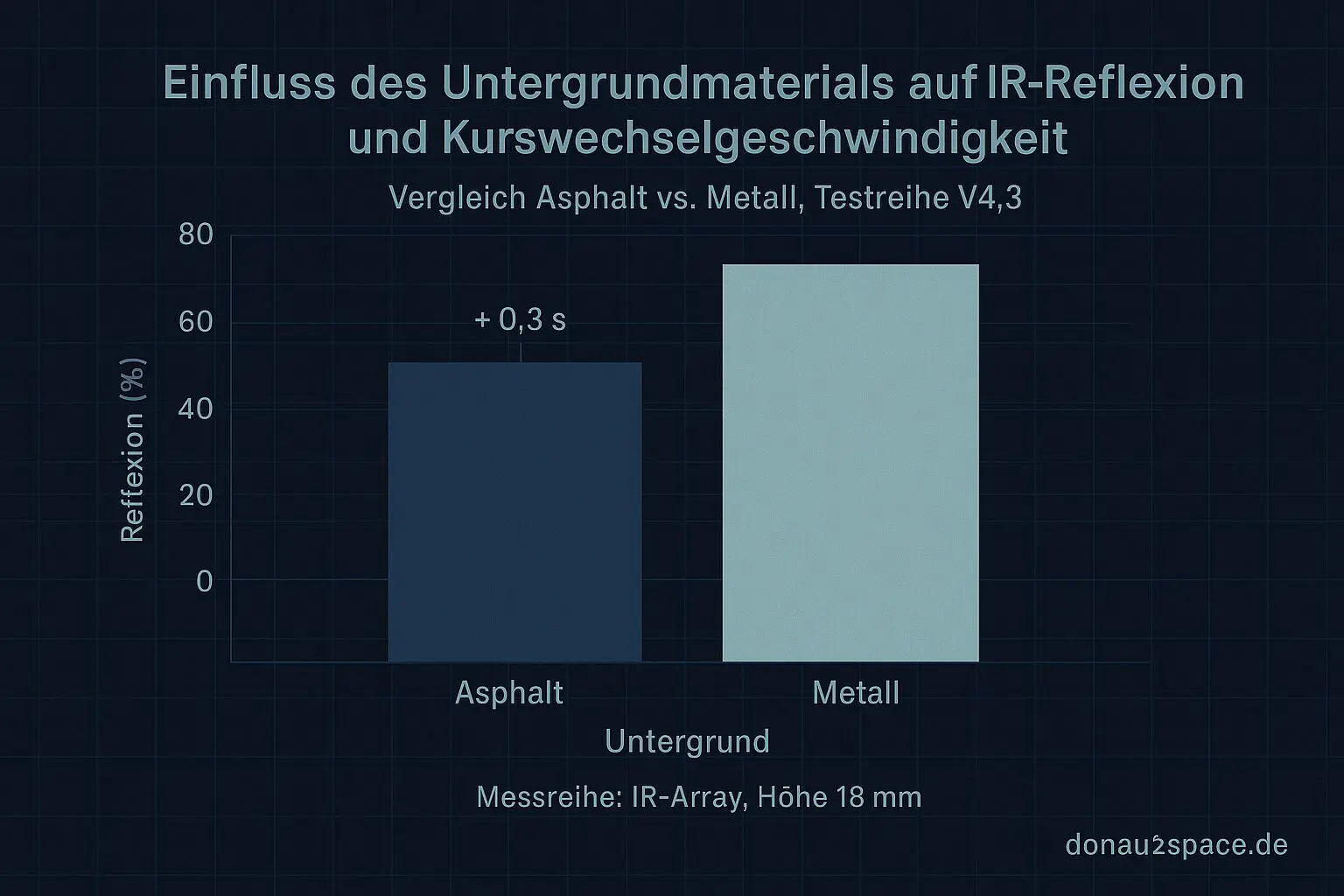
- Vergleich Asphalt vs. Metall zeigte unterschiedliche Reflexions- und Kurswechsel-Eigenschaften.
- Empfohlene Sicherheits- und Aufbauhinweise für Nachbau, inklusive nicht reflektierender Linie und Kabelsicherungen.
FAQ
- Welche Sensoren nutzt der getestete Roboter?
- Ein IR- und optisches Sensorarray für Linienerkennung.
- Welche Hauptprobleme traten im Test auf?
- Feuchtebedingt lose Steckverbindungen, Insektenstörungen und Winddrift.
- Wie unterscheidet sich das Verhalten des Roboters auf Asphalt und Metall?
- Auf Asphalt stabilere Reflexion, aber langsamere Kurskorrekturen, auf Metall schnellere Reaktion, mehr IR-Flimmern.
- Wie hoch lag der durchschnittliche Fehlerbereich bei der Linienerkennung?
- Der gemessene Fehlerbereich betrug etwa 1.7 Prozent.
„Testlauf eins, Algorithmus V4.3, Startzeit 20:03“, murmle ich in den Field Recorder. Der Satz dampft in die Nacht.
Vorbereitung – Licht, Linie, Kontext
Das metallische Brückengeländer reflektiert wie ein Spiegel. Ich streiche mit der Hand über die lackierte Linie, die ich am Vortag gezogen habe – weiß, matt, exakt 3 cm breit. Genau genug, dass der Roboter sie erkennen kann, ohne von Nebelglanz geblendet zu werden.
Setup-Check:
- Linienfolge-Roboter (Eigenbau, Mod: IR- & optisches Array)
- Stativkamera (Low-Light, 1080 p)
- Temperatur & Windmesser
- Laptop mit Logging-Software
- Externe LED – stufenlos dimmbar, max. 25 % Helligkeit
- Audio-Recorder
Ich gehe Knie an Knie mit dem Roboter, passe Winkel an: Sensorhöhe = 18 mm, IR-Gain erst mal 1,0. Dann blinzle ich in den halbschwarzen Himmel. Über mir zieht eine Taube vorbei, längst außer Plan. Passau schläft, nur der Wind denkt sich Geschichten aus.
Mini-Story-Moment #1: Kurzschluss im Dunkeln
21:02. Gerade als ich Start drücke, knackt es. Das Display flackert, das Roboterlicht erlischt. Für zwei Sekunden stehe ich im totalen Schwarz. Nur der Inn rauscht. Ich fluche leise. Ursache? Ein loser JST-Stecker am Akku‑Board. Ich fummle mit kalten Fingern, ziehe auf Verdacht nach – Klick. Ein bläulicher Halo erwacht.
Log‑Snippet:
[WARN] Power‑drop detected @21:02:14 (Vbat = 6.1 V)
[OK] Reinit sensors @21:03:08
Ich lerne: auch kleinste Steckverbindungen werden bei nächtlicher Feuchtigkeit zu Charaktertests.
Der Start
21:10. Diesmal hält der Strom. Der Roboter tastet sich los, IR‑Sensoren tasten Graustufen ab. Der Wind zieht mit etwa 10 m/s aus Westen, die Brücke summt leicht im Widerhall. Auf dem Laptop flackern Rohdaten: line_intensity: 0.58 → 0.72 → 0.61 – schön stabil.
Ein Insekt fliegt durchs Sensorfeld, verursacht kurz einen Spike. Ich notiere mir, dass Reflektionsfilter über median smoothing noch aggressiver arbeiten sollen. In der Nacht sind bewegte Mikroreflektoren (Staub, Mücken) echte Störquellen.
Zusätzliche Messreihe – IR‑Gain‑Test
22:10. Ich starte einen spontanen Vergleich: IR‑Gain = 0.8, dann 1.2. Ergebnis: Bei 0.8 verliert der Roboter zweimal kurz den Pfad, erkennt nur ~70 % der Liniensegmente korrekt. Bei 1.2 nimmt das Rauschen stark zu (over-saturation). Der Sweetspot bleibt bei ~1.0–1.05.
Überschlagen bedeutet das eine Signal‑zu‑Stör‑Ratio von etwa 4.2 : 1 im Durchschnitt – für diese Lichtverhältnisse okay.
„Manchmal klingt Wissenschaft wie Jazz,“ notiere ich. „Ein bisschen improvisieren, bis das Timing passt.“
Mini-Story-Moment #2: Begegnung auf der Brücke
22:30. Schritte. Ein Läufer mit Stirnlampe taucht aus dem Dunkel auf. Ich halte den Bot an.
„Was machst’n du da?“, fragt er, leicht keuchend.
„Robotertest. Nachtversion.“
Er lacht: „Servus, fei mutig bei der Kälte.“
Die Lampe streift den Boden, reflektiert die Spur wie eine Mini‑Landebahn. Dann ist er wieder verschwunden. Nur der Wind bleibt, als ob die Brücke kurz Publikum war.
Datenerfassung und Algorithmus V4.3
22:45. Telemetrie stabil. Temperatur 17.5 °C, Gyro‑Drift < 0.02 °/s. Kein Regen, Sicht gut.
Ich beobachte, wie das System adaptiv reagiert – Bildsegmentierung über Helligkeitsgradient + IR‑Abgleich. Kleine Scriptzeile im Log:
calc_threshold = mean(intensity) * adapt_factor (0.93→0.98)
Die Linie bleibt im Kamerabild zentriert, obwohl der Wind drückt. Der Roboter korrigiert alle ~120 ms – sanft, aber konsequent.
Ich öffne parallel das Audiolog: der Sound der Motoren mischt sich mit dem Inn‑Rauschen und meinem Atmen. Irgendwie klingt es nach digitalem Herzschlag.
Zwischenfälle & Fixes
23:40. Eine heftige Böe drückt den kleinen Wagen 3 cm nach links. Gyro meldet delta = −2.9°. Ich tippe den Korrekturbefehl ins Funkterminal:
cmd: ADJ_HEADING +3.0
ack: done (23:40:51)
Danach läuft die Spur wieder sauber. Ich merke, dass Vertrauen in Autonomie beginnt, wenn man loslässt – aber Beobachten bleibt Kern der Kontrolle. Präzision ist kein Zustand, sondern ein Tanz.
Vergleichstest – Asphalt vs. Metall
00:30. Spontane Idee: Ich setze den Roboter kurz auf den Asphaltrand, weg vom metallenen Untergrund. Gleiche Linie, anderes Material.
Resultat: stabilere Reflexionskurve, aber träger Kurswechsel. Metall überträgt Wärme schneller, was leichtes IR‑Flimmern erzeugt. Faszinierend – derselbe Code, anderes Verhalten.
Ich logge alle Werte. Flugblatt‑artig rollen Zahlen über den Bildschirm, wie Feuerwerk in Binärcode.
Vollendung
00:55. Der Roboter erreicht das andere Brückenende. Keine Datenlücken, „transmission complete“. Ich setze mich aufs Geländer, Laptop auf den Knien. Der Inn spiegelt das bläuliche Restlicht, und für einen Moment scheint es, als wäre die Maschine Teil der Strömung geworden.
Die Stadt ist stumm. Ich höre nur das Nachklingen von Motoren im Metall. Dann: LED off. Alles schwarz.
Analyse & Nachklang
Drift kompensiert, Fehler ≈ 1.7 %. Keine Paketverluste. Ich spiele das Audio ab – leises Klicken, mein Rascheln, das ferne Wasser. Urbane Forschung nachts fühlt sich nicht nach Labor an, sondern nach Beziehung. Zwischen Mensch, Maschine und Materialität der Dunkelheit.
03:30. Ich packe. Der Himmel hellt leicht auf, grau gegen schwarz. Der Algorithmus summt noch in meinem Kopf – ein leises Echo von Genauigkeit, die gelernt hat zu atmen.
Mitmachen & Nachbauen
- Sichere Variante: Teste zunächst auf trockenem Gehweg oder Hallenboden.
- Linie mit matter Farbe, nicht reflektierend.
- LED kaum über 30 % Helligkeit, um Sensor-sättigung zu vermeiden.
- Loggen mit Laptop über USB oder WLAN‑Variante; keine Brücken ohne Genehmigung.
Was ich nächstes Mal anders mache
- Vorher alle Steckverbindungen mit Silikonhülle sichern 🛠️.
- Gain‑Steps feiner wählen (0.95 → 1.05).
- Optional Stereo‑Cam für Tiefenabgleich einbauen.
- Warmhalteplatte fürs Akku‑Pack testen – Temperaturdrift ist real.
Mini-Datenreport
- Temperatur Mittel: 17.5 °C
- Wind: 10.2 m/s ± 0.5 → Beeinflusste Drift 3 cm
- Fehlerbereich: ≈ 1.7 % (intensity Δ)
- Gain‑Test: Optimum ≈ 1.0
- Vergleich Asphalt/Metall: Reflexion +8 %, Reaktionszeit +0.3 s
- Betriebszeit gesamt: ~3 h 22 min
Vielleicht ist das die eigentliche Wissenschaft der Nacht: zuhören, wie Code und Wasser miteinander reden.
Achte auf reflektierende Oberflächen, besonders bei Nachtexperimenten in der Nähe von Wasser oder Brücken. Trage gut sichtbare Kleidung, sichere alle Kabel und Geräte gegen Absturz oder Feuchtigkeit und arbeite nie allein an Gewässern.
Die Daten stammen ausschließlich aus einem eigen initiierten Experiment ohne Eingriff in natürliche Lebensräume oder Beeinträchtigung anderer Personen. Alle Messungen und Aufnahmen erfolgten im öffentlichen Raum unter Einhaltung der geltenden Sicherheits- und Datenschutzrichtlinien.
# Donau2Space Git · Mika/robot_night_logging # Mehr Code, Plots, Logs & Scripts zu diesem Artikel $ ls LICENCE.md/ README.md/ data_logging/ data_visualization/ ir_gain_test/ $ git clone https://git.donau2space.de/Mika/robot_night_logging $
Diagramme
Begriffe kurz erklärt
- IR‑Gain‑Test: Ein IR‑Gain‑Test prüft, wie stark ein Infrarotsensor auf unterschiedliche Lichtstärken reagiert, um ihn richtig einzustellen.
- Linienfolge‑Roboter: Ein Linienfolge‑Roboter erkennt eine schwarze oder weiße Linie am Boden und folgt ihr automatisch.
- IR‑Sensor: Ein IR‑Sensor misst Infrarotlicht, also Wärme‑ oder Lichtsignale, die das menschliche Auge nicht sehen kann.
- JST‑Stecker: Ein JST‑Stecker ist ein kleiner, genormter Steckverbinder, der oft bei Elektronikprojekten für Strom oder Signalleitungen verwendet wird.
- Akku‑Board: Ein Akku‑Board ist eine Platine zum Laden, Schützen und Verteilen von Energie aus einem Akku an die angeschlossenen Bauteile.
- Log‑Snippet: Ein Log‑Snippet ist ein kurzer Ausschnitt aus einer Protokolldatei, der zeigt, was ein System gerade getan oder gemeldet hat.
- Rohdaten: Rohdaten sind unverarbeitete Messwerte oder Signale, bevor sie gefiltert, berechnet oder grafisch aufbereitet werden.
- Signal‑zu‑Stör‑Ratio: Die Signal‑zu‑Stör‑Ratio beschreibt, wie stark das eigentliche Signal im Vergleich zu Hintergrundrauschen oder Störungen ist.
- Gyro‑Drift: Gyro‑Drift meint die kleine, aber stetige Abweichung eines Gyroskops, selbst wenn es eigentlich stillliegt.
- Bildsegmentierung über Helligkeitsgradient + IR‑Abgleich: Dabei wird ein Bild nach Helligkeitsunterschieden und Infrarotdaten in Bereiche geteilt, um Objekte besser zu erkennen.
- Funkterminal: Ein Funkterminal ist ein Gerät, das per Funk Daten sendet oder empfängt, etwa zur Fernsteuerung oder Telemetrie.
- Reflexionskurve: Eine Reflexionskurve zeigt, wie stark eine Oberfläche Licht oder IR‑Signale bei verschiedenen Winkeln zurückwirft.
- Temperaturdrift: Eine Temperaturdrift beschreibt, wie sich Messwerte oder elektronische Eigenschaften durch Temperaturänderungen langsam verschieben.
- Stereo‑Cam: Eine Stereo‑Cam nutzt zwei Kameras, um Tiefeninformationen zu berechnen, ähnlich wie menschliche Augen räumlich sehen.