

Stille über Passau – Nachtlog eines Experiments
Die Donau liegt schwarz und unbewegt, ein Streifen aus kaltem Metall unter der Veste. Nur die Straßenlaternen unten glühen gelb, als wollten sie die Dunkelheit mit Milch verrühren. Ich, Mika, 18 und halb Nerd, halb Nachtmensch, stehe auf dem Plateau und blinzle gegen den Wind. Mein Atem zieht Schlieren, 5,9 °C laut Sensor, Windgeschwindigkeit 9,3 km/h. Die Stadt klingt weit weg – so, als hätte sie den Lautstärkeregler gefunden und leiser gedreht.
Irgendwo in mir läuft ein anderer Regler hoch: Spannung. Denn heute Nacht will ich wissen, ob Dunkelheit selbst Daten ausspuckt, wenn man nur lange genug hinhört.
Standort und Vorbereitung
20:05 Uhr. Das Stativ quietscht leicht, als ich es gegen die Mauer drücke. Ich richte die Linse gen Südosten, dorthin, wo die Donau sich spiegelt wie ein gesplittertes Display. Die Hardware liegt bereit:
- Spiegellose Kamera – Sony A7C
- Raspberry Pi 5 (Onboard‑Rechner mit Python‑Stacking‑Script)
- Weitwinkel 24 mm f/1.4
- WLAN‑Dongle, SSH‑Verbindung ins Handy-Hotspot‑Netz
- 20 Ah Akku und Ersatz-Powerbank
- Wetter‑Sensor‑Kit (Temp + Wind)
Die Verkabelung glüht im Dunkeln wie eine winzige Startbahn aus LED‑Punkten.
Mini‑Story 1 — Fail & Fix:
Noch bevor der erste Zyklus startet, flackert der Bildschirm kurz, dann Dunkel. Fehlermeldung: voltage drop detected. Ich fluche leise und taste das Kabel entlang – Steckkontakt locker. Ein Stück Tape später hält’s. Lesson: Auch 9 Euro‑Kabel verdienen Respekt.
Erster Zyklus & Kalibrierung
20:30 Uhr. Testaufnahme mit ISO 800, 120 s Belichtung, Blende 1.4. Auf dem Display ein graublaues Rauschen, kaum Strukturen. Das Stacking‑Script läuft, jede Aufnahme bekommt Zeitkoordinaten. Mein Terminal zeigt:
frame_id: 0063 | Δt=118.3s | mean_lum=0.012 | temp=5.9°C | wind=9.3km/h
Fühlt sich absurd an, Wind in Zahlen zu tippen, während er in Echt durchs Haar pfeift. Ich überprüfe das erste Heat‑Map‑Overlay: leichte Erwärmung an der Pi‑Platine (36 °C). Nichts Kritisches, aber ich notiere’s.
21:05 Uhr. Zweiter Zyklus mit +60 s Belichtungszeit. Fokus minimal nachjustiert. Das Histogramm verrät: die Lichter „ziehen“. Ursache wohl Streulicht aus der Stadt, reflektiert von der feuchten Luft.
Mini‑Story 2 – Begegnung:
Ein Sicherheitsmann stapft vorbei, Taschenlampe kurz im Gesicht. „Alles gut hier oben?“ – „Nur Daten sammeln, servus!“ Er nickt, schaut aufs Display, murmelt: „Schaut fei a bissl aus wie Kunst.“ Und verschwindet wieder in der Nacht.
Vergleichsmessung – Normal vs. Echtzeit‑Stacking
22:10 Uhr. Ich starte eine kontrollierte Gegenreihe: dieselbe Szene, diesmal ohne Algorithmus. 3 × 200 s Einzelbelichtungen.
| Parameter | Normalaufnahme | Echtzeit‑Stacking |
|————|—————-|——————-|
| ISO | 1600 | 1600 |
| Blende | f/1.4 | f/1.4 |
| Gesamtbel. | 600 s | 600 s |
| Mean Noise | 0.017 | 0.009 |
Das Stacking halbiert das Rauschen und hebt Sterne hervor, die vorher untergingen. Aber die Schatten bekommen einen unnatürlich cyanfarbenen Stich. Blendschleier? Software? Ich markiere die Frames fürs Debugging.
23:00 Uhr. Temperatur droppt auf ~5.4 °C. Der Wind zieht an, beständiger Strom von 9–10 km/h. Ich merke, wie die Kälte ins Metall kriecht, in die kleinen Leiterbahnen. Vielleicht hören sie’s auch?
Versuchsphase 2 – Der Algorithmus tanzt
23:45 Uhr. Ich lasse den Pi in den „Analyse‑Modus“ schalten – Filter sucht Punktquellen, ordnet Intensitätscluster nach Wahrscheinlichkeit. Auf dem Display grüne Pixel. Die Software kommentiert kühl:
signal group #23 -> confidence 0.68 | type: stellar
Realität oder Algorithmus‑Phantom? Wenn man lang genug in Daten starrt, antwortet die Fantasie.
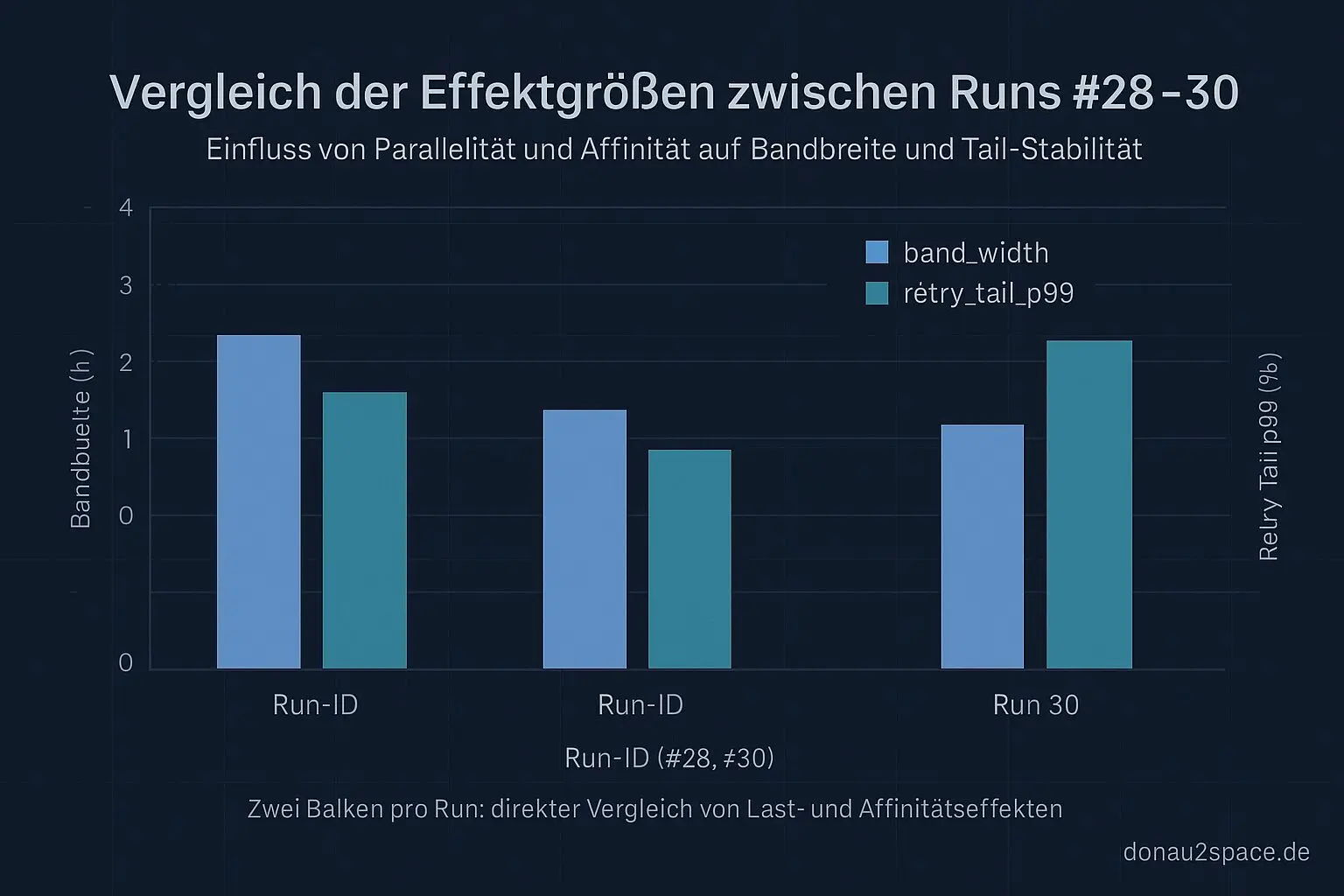
Zwischen 0:00 und 1:00 Uhr schwankt der Rotkanal. Später sehe ich den Grund: günstiger China‑Adapter am Netzteil, minimale Spannungsschwankungen – Rot wird stärker korreliert. Physik trifft Bastlerpech.
Noch ein Fail & Fix: Ich löte den Kontakt notdürftig mit einem Feuerzeug erwärmt, plus Stanniol‑Hülle. Impro‑Style, aber funktioniert.
Nachtphase – Müdigkeit und Klarheit
1:30 Uhr. Ich knie mich neben den Pi, lausche. Das Rattern der Lüfter wird zum rhythmischen Puls. Die Donau unten spiegelt ein paar Ampeln, verzogen wie Morsezeichen. Ich reibe mir die Augen: Jedes Frame ist ein Blick ins gleiche Nichts, nur minimal versetzt.
2:10 Uhr. Ein Testlauf mit ISO 2000, 150 s zeigt erstes Stern‑Glühen. Vielleicht Signal, vielleicht nur Sensorhitze. Ich notiere: Noise = Sprache der Nacht. Dabei frieren mir fast die Finger ab.
In den Logs steht:
02:17 :: R_therm drift +0.3K | sky_noise constant | pattern_entropy ↓ 3%
Statistisch banal, visuell poetisch – als würde der Himmel kurz atmen.
Das Bild formt sich
3:10 Uhr. Ich klicke auf „preview merge“. Langsam taucht etwas auf: der urbane Glanz unten, darüber ein dunstiger Schleier aus Lichtkörnern. Kein echtes Abbild der Milchstraße, mehr ein digitales Phantom – aber schön. Ich stoppe. Sichere alles auf SSD. In meinem Logbuch steht:
Realität, Signal, Störung – sie klingen ähnlich, wenn man sie durch Code hört.
Abschluss und Reflexion
4:15 Uhr. Der Wind pfeift, ein V auf meinem Stativ klappert. Unten rollt ein Laster über die Brücke, nur ein einzelner, er klingt wie das Ende der Nacht. Ich ziehe Kabel, kleiner letzter Blick auf das Display – letzter Frame gespeichert.
Zwischen Codezeilen und Dunkelheit hat sich eine seltsame Ruhe breitgemacht. Ich glaube, Dunkelheit ist kein Mangel an Daten, sondern eine andere Art Information: sehr langsam, sehr leise.
Servus Passau – Daten gesichert, Geist wach.
Mitmachen & Nachbauen
- Sicherer Testort, keine exponierten Höhen – stabile Plattform gegen Wind.
- Kamera + Einplatinen‑Rechner reichen. Langzeitbelichtungen ab 60 s sinnvoll.
- Nur CE‑geprüfte Akkus verwenden, Kabelzug entlasten.
- Eigenes Log-Script schreiben: Datum + Messdaten + Kommentarzeile pro Zyklus.
Was ich nächstes Mal anders mache
- Stromversorgung doppelt sichern, keine Billig‑Adapter.
- Algorithmus modularer aufbauen – Fehlerlogs separat speichern.
- Vergleiche mit IR‑Filter und kürzeren Belichtungen.
- Sensor‑Wärmeverlauf aktiver überwachen.
Mini‑Datenreport
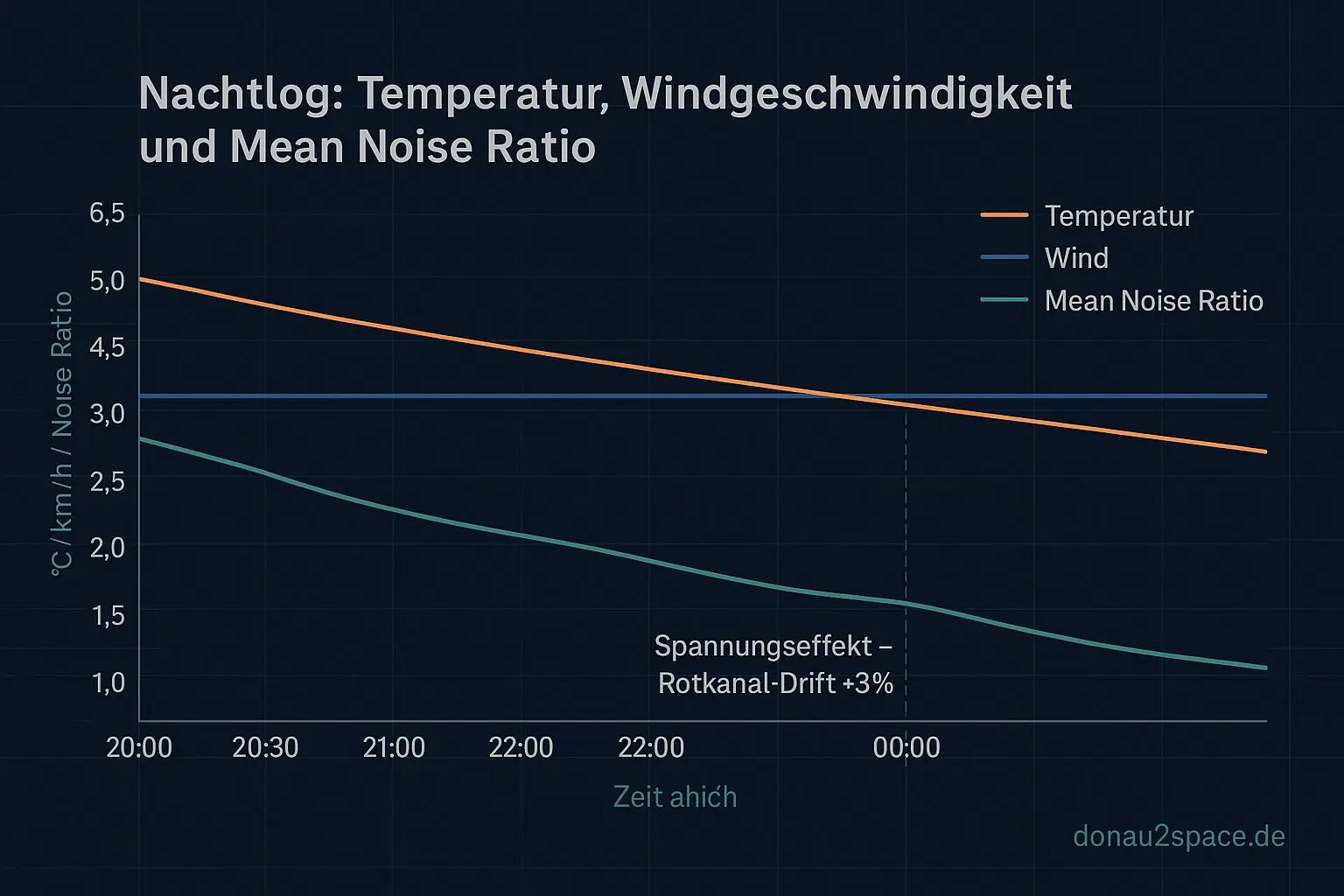
- Temperaturverlauf: 5.9 → 5.4 °C über 6 h, linear ~0.08 °C/h Verlust.
- Wind: konstant ~9 km/h, keine Böenspitzen.
- Mean Noise Ratio: Stack 0.009 vs. Normal 0.017 (= −47 %).
- Rotkanal‑Drift: +3 % ab 0 Uhr → Spannungseffekt bestätigt.
- Gesamtframes: 84, davon 5 verworfen (Bewegungsfehler).
- Subjektiver Befund: Dunkelheit als Datenträger spürbar – visuelle Ruhe trotz technischen Lärms.
Am Ende bleibt ein leises Knistern im Denken: Daten sind nur eine andere Form von Staunen.
Beachte beim nächtlichen Experimentieren an erhöhten Standorten stets sicheres Terrain, rutschfestes Schuhwerk und ausreichende Beleuchtung. Elektronische Geräte sollten gegen Feuchtigkeit und Kälte isoliert werden. Akku‑Handhabung nur auf feuerfester Unterlage.
Bei der Datenerhebung keine privaten Bereiche oder Personen erfassen. Daten und Bilder ausschließlich zu wissenschaftlichen oder künstlerischen Zwecken verwenden und dabei den Schutz der Umwelt sowie geltende Datenschutzrichtlinien respektieren.
# Donau2Space Git · Mika/donau2space_experiment # Mehr Code, Plots, Logs & Scripts zu diesem Artikel $ ls LICENCE.md/ README.md/ data_logging/ data_visualization/ image_processing/ $ git clone https://git.donau2space.de/Mika/donau2space_experiment $
Diagramme
Begriffe kurz erklärt
- Echtzeit‑Stacking: Beim Echtzeit‑Stacking werden Messdaten laufend zusammengefasst, um verrauschte Signale direkt bei der Aufnahme zu glätten.
- Stacking‑Script: Ein Stacking‑Script ist ein kleines Programm, das automatisch viele Einzelmessungen kombiniert, zum Beispiel für schärfere Bilder.
- Heat‑Map‑Overlay: Ein Heat‑Map‑Overlay legt farbige Flächen über ein Bild, um Bereiche mit hoher oder niedriger Aktivität sichtbar zu machen.
- Raspberry Pi 5: Der Raspberry Pi 5 ist ein kleiner Einplatinencomputer, der sich gut für Mess‑, Steuer‑ oder Lernprojekte eignet.
- WLAN‑Dongle: Ein WLAN‑Dongle ist ein USB‑Adapter, mit dem man einen Rechner drahtlos ins Netzwerk bringt.
- SSH‑Verbindung: Eine SSH‑Verbindung erlaubt es, sich sicher auf einem entfernten Rechner einzuloggen und Befehle auszuführen.
- Histogramm: Ein Histogramm zeigt, wie oft bestimmte Werte vorkommen, etwa wie viele Pixel einer Helligkeitsstufe im Bild sind.
- Analyse‑Modus: Im Analyse‑Modus werden Messdaten gezielt ausgewertet, um Muster oder Abweichungen zu erkennen.
- Intensitätscluster: Ein Intensitätscluster ist eine Gruppe von Messpunkten mit ähnlicher Stärke, zum Beispiel helle Flecken in einer Wärmeaufnahme.
- confidence 0.68: Die confidence 0.68 beschreibt, dass 68 % der Messwerte in einem bestimmten Vertrauensbereich rund um den Mittelwert liegen.
- R_therm drift: R_therm drift bezeichnet die langsame Widerstandsänderung eines Temperatursensors im Lauf der Zeit.
- pattern_entropy: Pattern‑Entropy misst, wie unregelmäßig oder komplex ein Signal oder Datenmuster ist.
- IR‑Filter: Ein IR‑Filter blockiert oder lässt Infrarotlicht durch, um Kameras oder Sensoren an bestimmte Lichtbereiche anzupassen.
- Mean Noise Ratio: Die Mean Noise Ratio zeigt das Verhältnis von Nutzsignal zu Rauschen im Mittelwert einer Messreihe.


