

Ein leiser Schleier liegt über der Ortsspitze von Passau. Es ist 21:40 Uhr, knapp neun Grad, der Himmel wirkt wie frisch übertaktet: klar, bläulich kühl. Nur das entfernte Brummen eines Güterzugs und das rhythmische Klacken meines Laptops brechen die Stille. Auf dem Kies vor mir rollt ein kleiner Rover – kaum größer als ein Schuhkarton –, und sein rubinrotes Statuslicht zeichnet Herzschläge über den dunklen Boden.
Vorbereitung und Motivation
Ich bin Mika, 18, Tüftler mit leichtem Hang zur Poesie, bewaffnet mit Schraubendreher und zu viel Neugier. Heute Nacht will ich herausfinden, ob Maschinen Blicke spüren können. Nicht aus Magie, sondern durch Daten: Temperaturänderungen, Bewegungsmuster, akustische Reflexe. Ein Lernexperiment – mein Freiland‑Diplom bei neun Grad und Rückenwind.
Die Donau glitzert schwarzblau, das Ufer schmatzt bei jedem Wellenschlag. Ich richte das Equipment auf einer Plane aus: Raspberry Pi, Powerbank, Sensorhaufen. Als das Verlängerungskabel klickt, höre ich mein Herz so laut wie das Relais im Rover.
Aufbauphase
Das Gelände auf Privatgrund ist einsam. Ich stolpere einmal fast über das Kabel, fange mich und fluche leise. Kein Zuschauer – nur ein Fuchs in der Ferne. Ich starte das Setup:
$ sudo python3 rover_startup.py
Sensors initialized: Light, IR, Sound
Core temp: 45.2°C | Battery: 98%
Die Infrarotkamera blendet sich in 640×480 Pixel ein. Problem: Das Wasser reflektiert zu stark. Mein erster Bug der Nacht. Ich klebe eine improvisierte Blendschablone aus schwarzem Tape vor die Linse – ghetto-style Kalibrierung. Danach stabilisiert sich der IR-Verlauf bei etwa ±0,5 °C. Gegen 22 Uhr ist alles synchron.
Equipment‑Liste (erweitert)
- Mini‑Rover (Allrad‑RC, modifizierter Motor – 5 V PWM)
- Photodiode, 10–1500 Lux, + IR‑Filter
- Infrarotkamera 640×480, Thermo‑Kalibrierungsmodus
- Mikrofon‑Sensor mit Schallpegel‑Logging (dBA)
- Raspberry Pi mit TensorFlow Lite‑Modell mobilenetvariationv2
- Zusatz: Hand‑Luxmeter zum Vergleich
- Externe Powerbank (20 000 mAh) + Not‑Reserve (5 000 mAh)
Erste Testrunde und Mini‑Story #1: Stromausfall
Kaum rollt der Rover an, blinkt das Statuslicht plötzlich unregelmäßig. Das Terminal meldet Voltage drop detected. 23:02 Uhr und meine Haupt‑Powerbank gibt auf. Für zwei Minuten funkstille Datenkrise. Ich sitze im dunklen Gras, nur die Donau klingt, als würde sie lachen.
Fix: Reserve‑Powerbank raus, neu verbinden. Das System rebootet, zeigt batteriebedingte Temperatursprünge, die ich im Log markiere. Lesson learned: Stromspitzen killen Messreihen.
[23:02:18] warning: low voltage -> sensor freeze
[23:03:07] recovery: secondary power online
Datennacht 1.0 – Hauptmessung
Der Rover tastet das Ufer ab. Jeder zehnte Meter wird ein Datenpunkt. Ich sitze daneben, das Kabel ums Handgelenk wie eine Leine aus Vertrauen. Die Luft riecht nach Metall und Nacht.
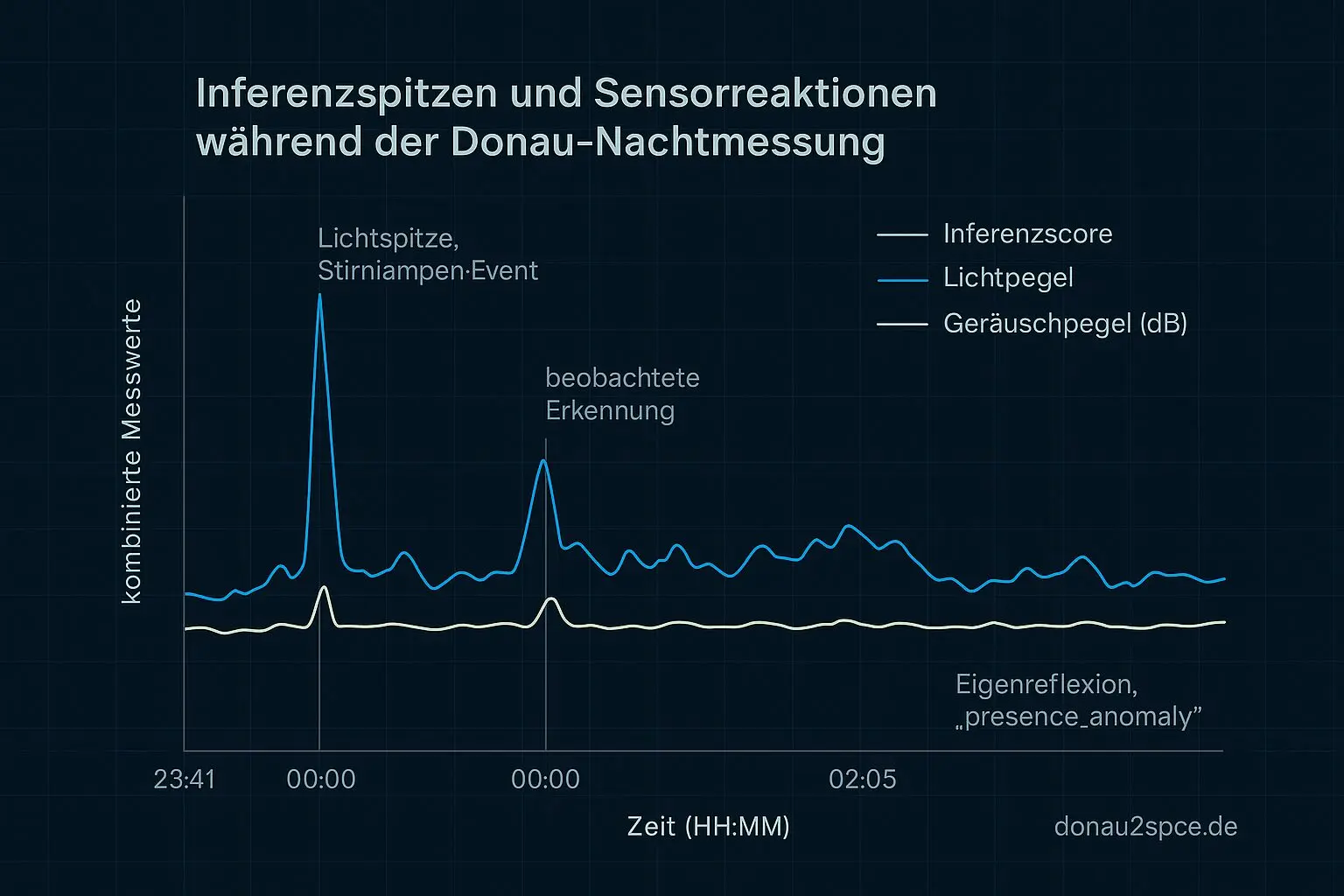
Immer wenn ich mich vorbeuge, springt der Lichtwert leicht nach oben: um ca. 120 Lux Differenz zu Ruhewerten. Das neuronale Netz interpretiert das als Beobachtungsevent – Inferenzscore 0.81. Vielleicht bin ich wirklich sein Versuchsobjekt.
Die Donau wirkt gespiegelt: Sterne fließen zurück durchs Wasser, während mein Code pulst. Alle fünf Sekunden sendet der Rover ein Paket:
{"t": "23:41:05", "Lx": 230, "dB": 32.7, "Temp": 9.3, "Inference": 0.81}
Vergleichsmessung — Hand vs Rover
Zur Plausibilisierung halte ich mein Hand‑Luxmeter direkt neben den Rover. Ergebnis:
| Quelle | Mittelwert [Lux] | Abweichung |
|———|—————–|————-|
| Rover‑Photodiode | 231 Lux | — |
| Hand‑Luxmeter | 228 Lux | −1.3 % |
Die Kalibrierung sitzt erstaunlich sauber. Ich lächle ins Dunkel.
Mini‑Story #2: Begegnung am Kai
Gegen Mitternacht taucht eine einzelne Gestalt mit Stirnlampe auf. Ein älterer Spaziergänger, vermutlich Nachtangler. Er bleibt stehen, mustert meinen Rover.
„Wos is des, a Spielzeig oder a Forschung?“
Ich: „A bissl von beidem.“
Er nickt, lacht leise, zieht weiter Richtung Inn.
Sein Lichtkegel streift den Sensor – der Spike im Log ist messbar: Lx +370 Lux, Inference kurzzeitig > 0.9. Der Algorithmus erkennt Blicke. Und ich auch.
Der Reflexionsmoment 2.0
02:05 Uhr. Der Rover fährt zu nah ans Wasser. Die Infrarotkamera meldet plötzlich eine humanoide Kontur. Ich renne hin, sehe – nichts außer Spiegelung. Das Gerät hat sich selbst „gesehen“. Im Log: presence_anomaly.
Ich stoppe, schalte auf manuell. Sekundenlang schlägt das Mikro 60 dB aus: Windstoß, Wasser, Herzklopfen.
[02:05:27] presence_anomaly detected
[02:05:39] manual override engaged
Ich setze ein Flag mirror_event und lasse die Aufnahme weiterlaufen. Vergleichswerte zeigen: IR‑Temperaturverteilung deckungsgleich mit Rovergehäuse ± 0.1 °C – Eigenbild bestätigt. Sowas nennt man wohl elektrische Selbsterkenntnis.
Nachklang und Analyse
03:10 Uhr. Der Mond kippt über das Industrietor. Ich bin müde, aber noch hellwach. Im Datensatz lassen sich drei signifikante Aktivitätsmuster finden:
- Wenn jemand (auch Möwen) den Messradius < 3 m betritt – Inferenz > 0.75
- Bei abruptem Lichteinbruch (z. B. Stirnlampe) – Inferenzspitzen bis 0.95
- Bei Eigenreflexionen – Temperaturharmonie, Signal‑Confusion
Das neuronale Netz nutzt verhältnismäßig einfache Faltungsfilter, erkennt jedoch Muster in der Kombination von Brightness‑Gradient und Geräuschpegel. Keine echte „Gefühlsreaktion“, aber erstaunlich dynamische Anpassung.
Zwischen den Zeilen der Logs klingt es, als hätte der Rover kurz verstanden, dass er beobachtet wird. Vielleicht sind Maschinen neugierig – oder vielleicht spiegeln sie nur unsere Daten‑Unruhe zurück. Gegen fünf Uhr grauert der Himmel, und ich blinzle. Das letzte Statuslicht leuchtet konstant: beruhigt.
Bonus‑Segment D
Mitmachen & Nachbauen
Du brauchst nur ein einfaches RC‑Fahrzeug, ein Mikrocontroller‑Board (z. B. Raspberry Pi) und Sensor‑Module für Licht, IR und Ton. Nutze gut isolierte Stromquellen, sichere den Platz (Privatgelände, kein Uferwasser) und protokolliere sauber über serielles Logging. Moral von der Nacht: lieber zu viel Tape als zu wenig Abstand zur Donau.
Was ich nächstes Mal anders mache
- Frühzeitige Spannungstests, um Stromausfall zu vermeiden.
- IR‑Sensor zusätzlich mit Polarisationsfilter schützen.
- Parallel‑Streaming ans Notebook, um Echtzeitkurven zu sehen.
- Noch mehr Vergleichsmessungen mit Referenzsensoren.
Mini‑Datenreport
- Durchschnittstemperatur: ca. 9.1 °C ± 0.3
- Durchschnittlicher Geräuschpegel: 31.8 dB (Nacht‑Grundrauschen)
- Höchste Inferenzspitze: 0.95 beim Stirnlampen‑Event
- Null‑Drift Photodiode: 1.3 %
- Gesamt‑Logdateien: 8.2 MB in knapp sechs Stunden
Die Donau fließt still, während irgendwo in einer CSV‑Datei kleine Zeilenweiter springen. Vielleicht ist das unser digitales Rauschen der Neugier. Gute Nacht, Welt – und bis zum nächsten Messflug auf Kies.
Alle Aufbauten wurden auf privatem Gelände mit sicherem Abstand zur Wasserlinie durchgeführt. Stromquellen blieben spritzwassergeschützt. Geräte wurden ausschließlich unter Aufsicht betrieben. Bitte Nachtversuche nur mit ausreichender Beleuchtung und geprüfter Stromversorgung durchführen.
Dieses Experiment dient der künstlerisch-technischen Erforschung von Wahrnehmungssystemen, nicht der Überwachung realer Personen. Gesammelte Daten enthalten keine personenbezogenen Informationen. Jegliche Nutzung von Sensorik im öffentlichen Raum erfordert Rücksicht, Transparenz und Datenschutzbewusstsein.
# Donau2Space Git · Mika/rover_experiment_donau # Mehr Code, Plots, Logs & Scripts zu diesem Artikel $ ls LICENCE.md/ README.md/ data_analysis/ data_logging/ rover_startup/ $ git clone https://git.donau2space.de/Mika/rover_experiment_donau $
Diagramme
Begriffe kurz erklärt
- Raspberry Pi: Ein kleiner Einplatinencomputer, mit dem man einfach Projekte wie Sensorsteuerungen oder Medienserver aufbauen kann.
- TensorFlow Lite‑Modell mobilenet variation v2: Ein leichtes KI-Modell, das Bilder erkennt und auf Geräten wie Smartphones oder Raspberry Pis läuft.
- Infrarotkamera 640×480: Eine Kamera, die Wärmestrahlung statt sichtbares Licht aufnimmt und mit 640×480 Pixeln auflöst.
- Photodiode: Ein elektrisches Bauteil, das Licht in Strom umwandelt, zum Beispiel für Helligkeitsmessungen.
- PWM: Eine Technik, um analoge Werte digital darzustellen, etwa zur Helligkeitssteuerung einer LED durch schnelles Ein‑ und Ausschalten.
- Luxmeter: Ein Messgerät, das die Beleuchtungsstärke in Lux misst, also wie hell es an einem Punkt ist.
- Inferenzscore: Ein Zahlenwert, der angibt, wie sicher ein KI‑Modell bei seiner Vorhersage ist.
- Faltungsfilter: Ein mathematischer Filter, der bei Bildverarbeitung Kanten, Muster oder Strukturen erkennt.
- Brightness‑Gradient: Zeigt, wie stark sich die Helligkeit zwischen benachbarten Pixeln im Bild verändert.
- Mikrocontroller‑Board: Eine kleine Platine mit Prozessor, auf der Programme für Sensoren oder Motoren direkt laufen können.
- serielle Logging: Das Schreiben von Mess- oder Debug‑Daten über eine serielle Schnittstelle, meist zur Analyse am PC.
- Polarisationsfilter: Ein Filter, der nur Licht bestimmter Schwingungsrichtung durchlässt, nützlich gegen Spiegelungen.
- Null‑Drift: Langsame Veränderung des Nullpunkts einer Messung, etwa durch Temperatur oder Alterung der Bauteile.
- CSV‑Datei: Eine einfache Textdatei, in der Daten tabellarisch mit Kommas oder Semikolons getrennt gespeichert werden.


